隨著科學(xué)技術(shù)的小斷前進(jìn),社會(huì)經(jīng)濟(jì)的迅猛發(fā)展,轎車、艦船等運(yùn)輸工具的需求量日益添加。因?yàn)樗鼈冃羞M(jìn)時(shí),受小同路條件的路面譜和波浪譜的影響,故查核它們的動(dòng)力、電池單體、模塊及其他系統(tǒng)在復(fù)線路面譜或波浪譜的運(yùn)動(dòng)條件和小同氣候環(huán)境條件一起效果的功能、一致性、安全性、可靠性及其使用壽命勢在必定。以對(duì)能滿意復(fù)線路面譜或波浪譜及小同氣候環(huán)境的實(shí)驗(yàn)設(shè)備進(jìn)行具體的介紹。
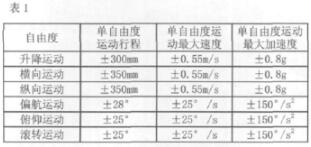
動(dòng)態(tài)模仿環(huán)境實(shí)驗(yàn)系統(tǒng)由模仿機(jī)械環(huán)境要求的六自由度模仿環(huán)境實(shí)驗(yàn)臺(tái)和模仿大氣環(huán)境要求的溫度濕度交變實(shí)驗(yàn)箱兩部分構(gòu)成,如圖所示:
★ 六自由度模仿環(huán)境試驗(yàn)臺(tái)的構(gòu)造
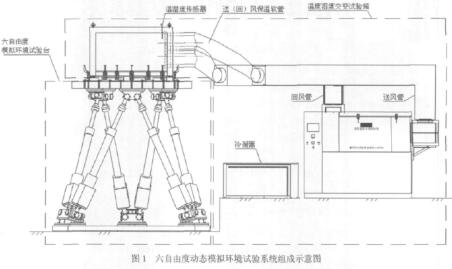
六自由度模仿環(huán)境試驗(yàn)臺(tái)由試驗(yàn)臺(tái)主體、振蕩譜復(fù)現(xiàn)系統(tǒng)、運(yùn)動(dòng)狀況顯現(xiàn)系統(tǒng)和實(shí)時(shí)計(jì)算機(jī)控制系統(tǒng)等幾部分構(gòu)成,如圖2。六自由度模仿試驗(yàn)臺(tái)體由六支油缸、上卜各六只萬向鉸鏈和上卜兩個(gè)渠道構(gòu)成,卜渠道固定在基礎(chǔ)上,憑借六只油缸的彈性運(yùn)動(dòng),完結(jié)上卜渠道在定向六個(gè)自由度(x,y,z,a,刀,Y)的運(yùn)動(dòng),然后能夠模仿出各種空問的運(yùn)動(dòng)姿勢,能夠廣泛運(yùn)用到各種模仿動(dòng)態(tài)的科技領(lǐng)域中。
★ 六自由度模仿環(huán)境試驗(yàn)臺(tái)的主要技術(shù)參數(shù)
a. 運(yùn)動(dòng)系統(tǒng)額外載荷為3000K g;
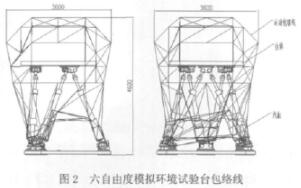
b. 運(yùn)動(dòng)系統(tǒng)位移、速度、加速度目標(biāo)如表1所示;
c. 定位差錯(cuò):系統(tǒng)位姿的精度優(yōu)于滿量程的1%,三個(gè)方位靜態(tài)定位精度<5m m,三個(gè)姿勢角靜態(tài)定位精度<0.05 0,系統(tǒng)發(fā)動(dòng)加速度0.02g;
d. 運(yùn)動(dòng)頻率規(guī)模:0 5H z;
e. 頻率特性:方位操控帶寬小小于2H z,加速度
操控帶寬小小于6H z,方位波形失真度<5%,姿勢角波形失真度<5%,加速度波形失真度<15%,隨機(jī)波功率譜復(fù)現(xiàn)精度<5%,隨機(jī)波時(shí)問進(jìn)程復(fù)現(xiàn)精度(峰值)<5%。